一眼看懂
封面预览
论文针对视觉-语言-动作模型在序列任务中的不确定性量化问题,提出了序列校准的概念。
- 论文针对视觉-语言-动作模型在序列任务中的不确定性量化问题,提出了序列校准的概念。
- 核心目标是在只能观测到部分轨迹且最终结果延迟的情况下,评估并提升模型对任务成功概率预测的准确性。
- 论文通过建立序列 Brier 分数与强化学习中价值函数的联系,提出了基于时序差分的校准方法。
Card 01
研究单位
研究单位
- Technion - Israel Institute of Technology(根据项目主页 URL 及作者背景推断)
Card 02
论文概述
论文概述
- 论文针对视觉-语言-动作模型在序列任务中的不确定性量化问题,提出了序列校准的概念。
- 核心目标是在只能观测到部分轨迹且最终结果延迟的情况下,评估并提升模型对任务成功概率预测的准确性。
- 论文通过建立序列 Brier 分数与强化学习中价值函数的联系,提出了基于时序差分的校准方法。
Card 03
核心贡献
核心贡献
- 首次为序列决策任务建立了形式化的校准框架,定义了序列 Brier 分数,揭示了其最小化目标与策略价值函数的一致性。
- 提出了TDQC(Temporal-Difference Q-based Calibration)方法,利用强化学习中的 TD 损失来训练校准器,解决了传统 Monte Carlo 方法在长序列中的偏差问题。
- 实验证明,仅利用黑盒动作概率的 TDQC 方法在性能上可以匹敌甚至超越需要访问模型内部特征的 SOTA 方法 SAFE。
- 展示了校准后的价值预测器在LIBERO基准测试中能有效指导测试时的动作搜索,将 OpenVLA 模型的成功率提升了 15%。
Card 04
方法描述
方法描述
- 将序列校准问题建模为寻找一个预测函数 $f$,使其能根据历史轨迹 $h_t$ 预测最终成功概率,并最小化序列 Brier 分数。
- 关键技术是证明了最小化序列 Brier 分数等价于学习策略 $\pi$ 的动作价值函数 $Q^\pi$。
- 使用时序差分损失训练一个神经网络预测器 $f_\theta$,通过自举法利用未来时刻的预测值来更新当前预测,结合目标网络以保证训练稳定性。
- 利用保形预测根据校准分数设定动态阈值,实现任务执行过程中的早期故障检测与停止。
Card 05
数据集与资源
数据集与资源
- 使用了LIBERO基准测试(模拟环境)以及真实的 Franka 机器人数据集。
- 涉及的 VLA 模型包括 OpenVLA、$\pi_0$、$\pi_0$-FAST 和 UniVLA。
- 训练数据由策略生成的轨迹及其对应的稀疏二值成功标签组成。
Card 06
评估与结果
评估与结果
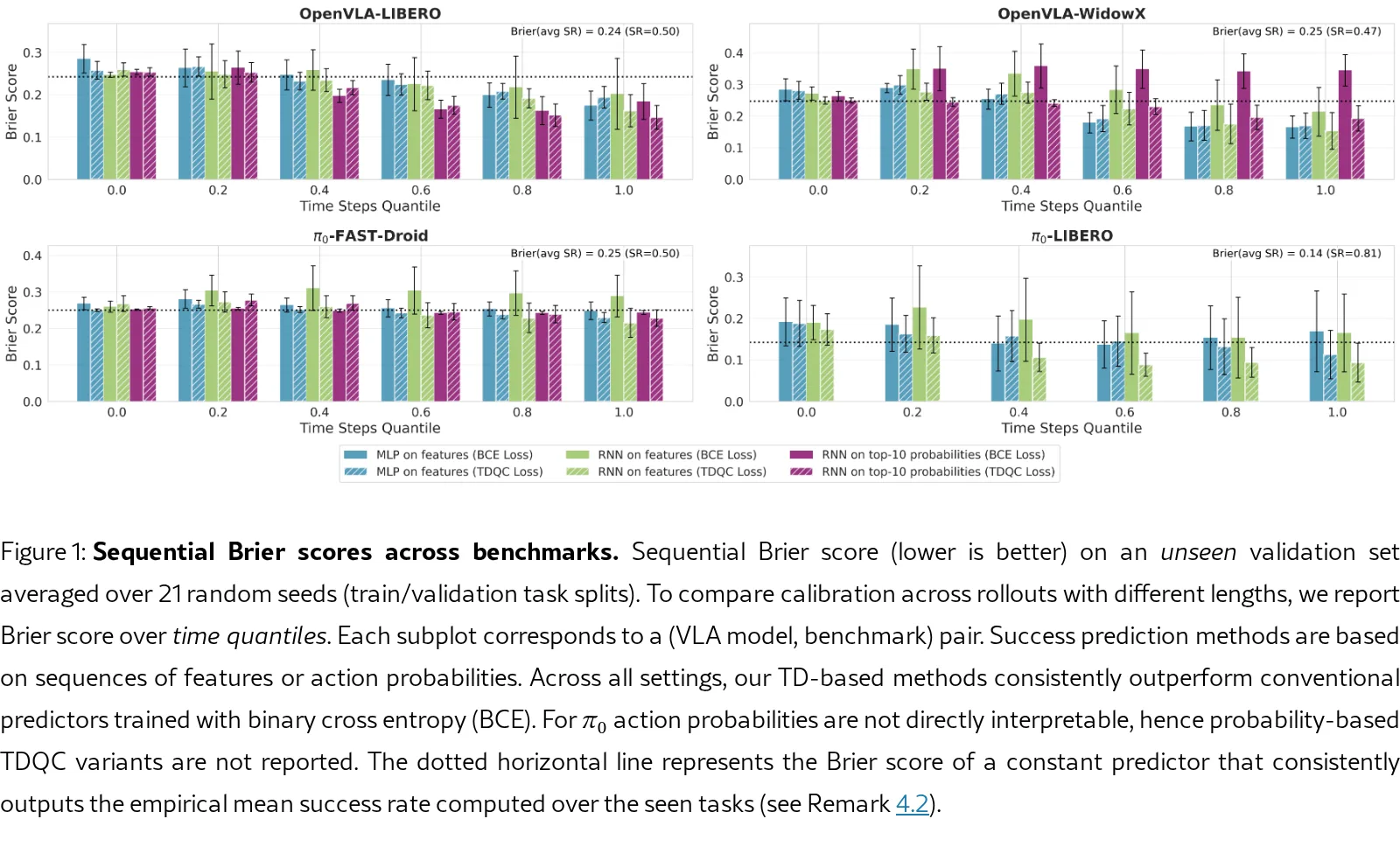
- 评估指标包括序列 Brier 分数(越低越好)、ROC-AUC 和故障检测的早期识别能力。
- 在 LIBERO 和 Franka 数据集上的实验结果显示,TDQC 在序列 Brier 分数上显著优于基于二元交叉熵(BCE)训练的方法和 SAFE 方法。
- 结果表明,即使不使用模型内部特征,经过 TD 校准的动作概率也能提供有效的任务成功预测,打破了此前认为动作概率不可用的认知。
- 在引导动作搜索应用中,利用 TDQC 预测器选择动作,使 OpenVLA 在未见任务上的成功率显著提高。