一眼看懂
封面预览
核心目标:提出 CARLA-Air,一个统一的开源仿真基础设施,旨在单一Unreal Engine进程中整合高保真城市场景与物理精确的多旋翼飞…
- 核心目标:提出 CARLA-Air,一个统一的开源仿真基础设施,旨在单一Unreal Engine进程中整合高保真城市场景与物理精确的多旋翼飞…
- 研究问题:现有开源平台存在领域分隔——城市场景模拟器(如CARLA)缺乏空中动力学,而无人机模拟器(如AirSim)缺乏真实地面交通;桥接式联…
- 关键价值:继承并延续了已停止维护的AirSim飞行模拟能力,提供可持续的演进路径,同时保留原生API实现零代码修改迁移
Card 01
研究单位
研究单位
- 作者单位未在HTML中明确标注(标注为1和2,但未显示具体机构名称)
- 第一作者:Tianle Zeng(标注为1,∗,∗表示同等贡献)
- 通讯作者:Hong Zhang(标注为1,†)
Card 02
论文概述
论文概述
- 核心目标:提出 CARLA-Air,一个统一的开源仿真基础设施,旨在单一Unreal Engine进程中整合高保真城市场景与物理精确的多旋翼飞行模拟,解决现有模拟器领域分割的问题
- 研究问题:现有开源平台存在领域分隔——城市场景模拟器(如CARLA)缺乏空中动力学,而无人机模拟器(如AirSim)缺乏真实地面交通;桥接式联合仿真引入同步开销,无法保证严格的空间-时间一致性
- 关键价值:继承并延续了已停止维护的AirSim飞行模拟能力,提供可持续的演进路径,同时保留原生API实现零代码修改迁移
Card 03
核心贡献
核心贡献
- 单一进程空气-地面集成:通过组合设计解决UE4引擎级别的GameMode冲突(每个世界仅允许一个活动游戏模式),实现共享物理tick和渲染管线
- 完整API兼容性:同时保留CARLA和AirSim原生Python API及ROS 2接口,支持现有代码库零修改迁移
- 高保真物理一致仿真:提供逼真的城市和自然环境,包含规则合规交通流、社会感知行人、空气动力学一致的多旋翼动力学,支持每帧同步采集18种传感器模态
- 可扩展资产管道:支持研究人员导入自定义机器人平台、UAV配置、车辆和环境地图
- 即用型工作负载支持:开箱即用支持空气-地面协作、具身导航与视觉语言动作、多模态感知与数据集构建、强化学习策略训练
Card 04
方法描述
方法描述
- 架构设计:采用单继承加组合方案解决GameMode冲突——继承CARLA的所有地面仿真子系统,将AirSim空中飞行演员作为常规世界实体生成
- 源修改最小化:通过最小化桥接层实现集成,仅添加约8000行新代码
- 坐标系统一:统一AIRLA和CARLA的坐标系统
- 传感器同步:在每个仿真tick上同步捕获所有空中和地面平台的传感器数据
Card 05
数据集与资源
数据集与资源
- 构建基础:基于Unreal Engine 4,集成CARLA和AirSim
- 传感器支持:最多18种传感器模态(RGB、深度、语义分割、LiDAR、雷达、IMU、GNSS、气压计等)
- 发布形式:提供预构建二进制文件和完整源代码
- 代码仓库:https://github.com/louiszengCN/CarlaAir
Card 06
评估与结果
评估与结果
- 实验1 - 帧率和资源扩展:测试不同并发传感器数量下的帧率表现,验证单进程架构的稳定性
- 实验2 - 内存稳定性:验证稳态VRAM使用和内存泄漏情况
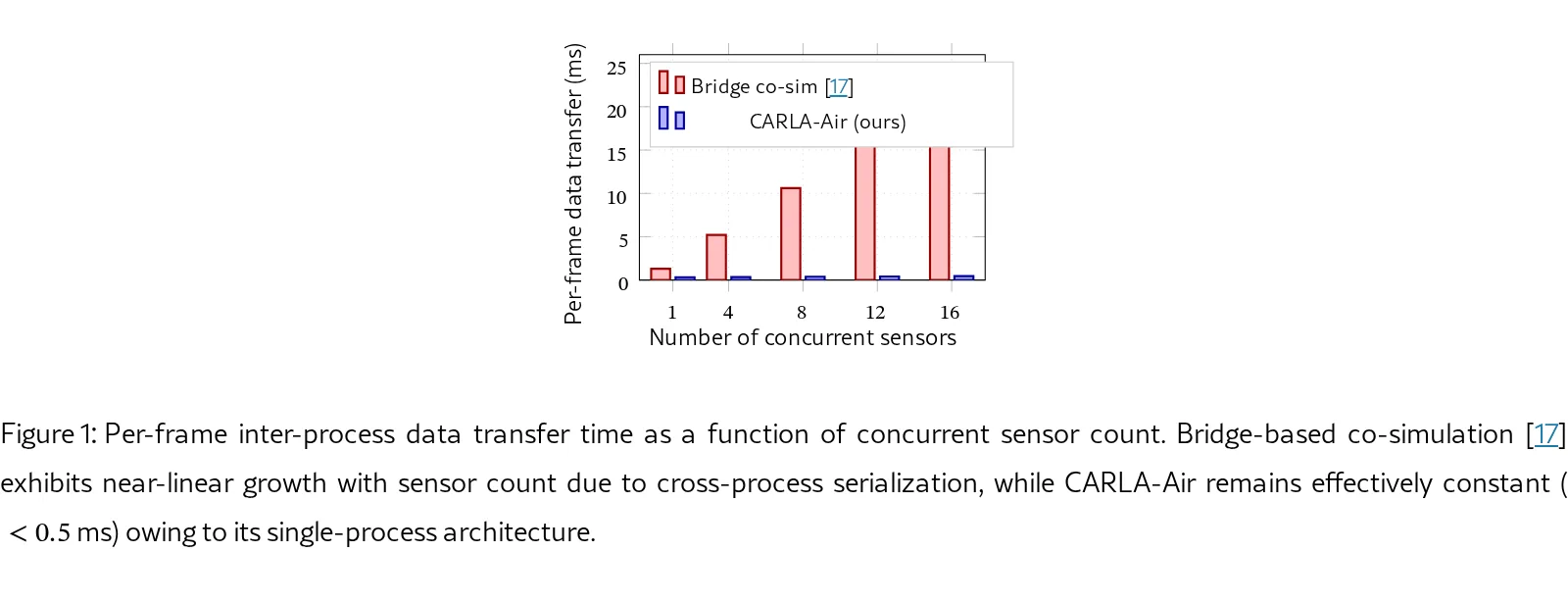
- 实验3 - 通信延迟:评估tick率协调和进程内数据传递延迟,结果显示per-frame数据传递时间<0.5ms
- 对比分析:与桥接式联合仿真(如TranSimHub)相比,CARLA-Air在传感器数量增加时数据传递时间保持稳定,而桥接方案呈近线性增长
- 应用验证:通过5个代表性应用场景验证平台能力,包括空-地协作精确着陆、具身导航数据生成、跨视角感知等