一眼看懂
封面预览
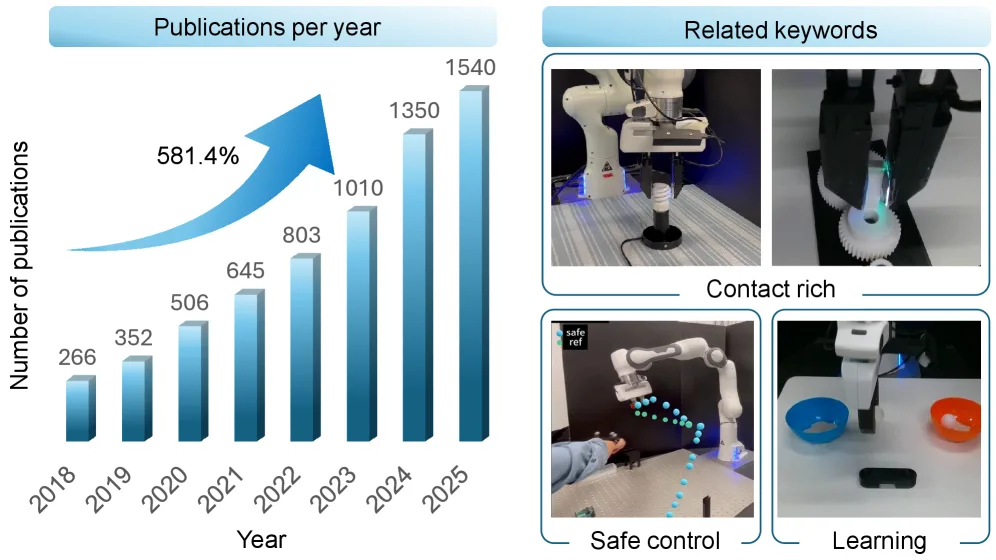
本文是首篇以安全为核心的综述论文,系统回顾了接触丰富型机器人任务中的安全学习方法,涵盖从经典基于学习的方法到新兴的安全基础模型
- 本文是首篇以安全为核心的综述论文,系统回顾了接触丰富型机器人任务中的安全学习方法,涵盖从经典基于学习的方法到新兴的安全基础模型
- 针对接触丰富任务中固有的不确定性、复杂动力学和高损坏风险,论文探讨如何在安全探索(学习阶段)和安全执行(部署阶段)两个维度保障机器人安全
- 特别关注视觉-语言模型(VLMs)和视觉-语言-动作模型(VLAs)等机器人基础模型带来的新安全机遇与放大风险
Card 01
研究单位
研究单位
- Istituto Italiano di Tecnologia (IIT), Genova, Italy(主要单位,含 Human-Robot Interfaces and Interaction Lab 和 HHCM Lab)
- Università di Genova, Genoa, Italy(博士项目合作)
- Purdue University, West Lafayette, IN, USA(Edwardson School of Industrial Engineering)
Card 02
论文概述
论文概述
- 本文是首篇以安全为核心的综述论文,系统回顾了接触丰富型机器人任务中的安全学习方法,涵盖从经典基于学习的方法到新兴的安全基础模型
- 针对接触丰富任务中固有的不确定性、复杂动力学和高损坏风险,论文探讨如何在安全探索(学习阶段)和安全执行(部署阶段)两个维度保障机器人安全
- 特别关注视觉-语言模型(VLMs)和视觉-语言-动作模型(VLAs)等机器人基础模型带来的新安全机遇与放大风险
Card 03
核心贡献
核心贡献
- 提出安全中心化的分类体系:按学习阶段(探索 vs. 执行)、安全集成层级(规划/控制/端到端)、感知模态等维度结构化组织现有方法
- 情境化分析:将安全学习方法映射到具体接触丰富任务(装配、插入、表面交互、物理人机交互),分析合规性、力控制等操作挑战
- 基础模型安全整合:系统讨论 VLM/VLA 方法的安全机遇(语言级约束规范、多模态安全信号 grounding)与风险(幻觉、误 grounding)
- 识别关键空白与挑战:包括 sim-to-real 安全迁移、标准化基准缺失、可证明安全泛化、人机协作安全等
- 前瞻性研究方向:提出标准化安全接触基准、物理感知基础模型、可扩展验证等未来研究路径
Card 04
方法描述
方法描述
- 安全探索方法:基于可达性的轨迹保护(RTS)、模型预测屏蔽(MPS)、控制障碍函数(CBF)引导的 MPC、隐式安全集算法、基于优势的干预等
- 安全执行方法:变阻抗/导纳控制的强化学习调参、安全滤波器(CBF/可达性/MPC 屏蔽)、力/力矩约束的在线执行
- 可证明安全方法:Lyapunov 稳定性分析、控制障碍函数(CBF)的前向不变性保证、收缩度量(Contraction Metrics)、Hamilton-Jacobi 可达性分析
- 基础模型方法:VLM/VLA 的分层架构(语义规划-参数化技能-安全执行层)、代码即策略(Code-as-Policies)、触觉-视觉-语言-动作多模态融合
- 混合集成架构:规划-学习-滤波管道、合规动作抽象与认证投影、安全包装器下的生成/残差策略
Card 05
数据集与资源
数据集与资源
- 论文为综述性研究,不涉及单一数据集或模型训练
- 涵盖的仿真环境包括:Gymnasium、Safety Gymnasium、RoboVerse、Robust Gymnasium、Safe-Control-Gym 等
- 涉及的真实机器人平台:协作机器人(cobots)、工业机械臂、人形机器人等
- 多模态数据:力/力矩传感、视觉、触觉、语言指令、本体感知状态
Card 06
评估与结果
评估与结果
- 评估基准:缺乏统一的标准化安全接触基准,现有工作分散于各自仿真环境和任务设置
- 主要评估指标:安全性(约束违反率、碰撞次数)、任务成功率、力/力矩包络遵守、样本效率、sim-to-real 迁移性能
- 关键发现:基于可达性的方法提供最强硬安全保证但适应性受限;MPC/CBF 方法在线计算开销大;学习方法数据效率高但形式化保证弱;VLM/VLA 方法在语义 grounding 和物理约束对齐方面存在显著挑战
- 六维比较分析:保证强度、模型依赖性、在线效率、保守性/可调性、可扩展性、数据效率