一眼看懂
封面预览
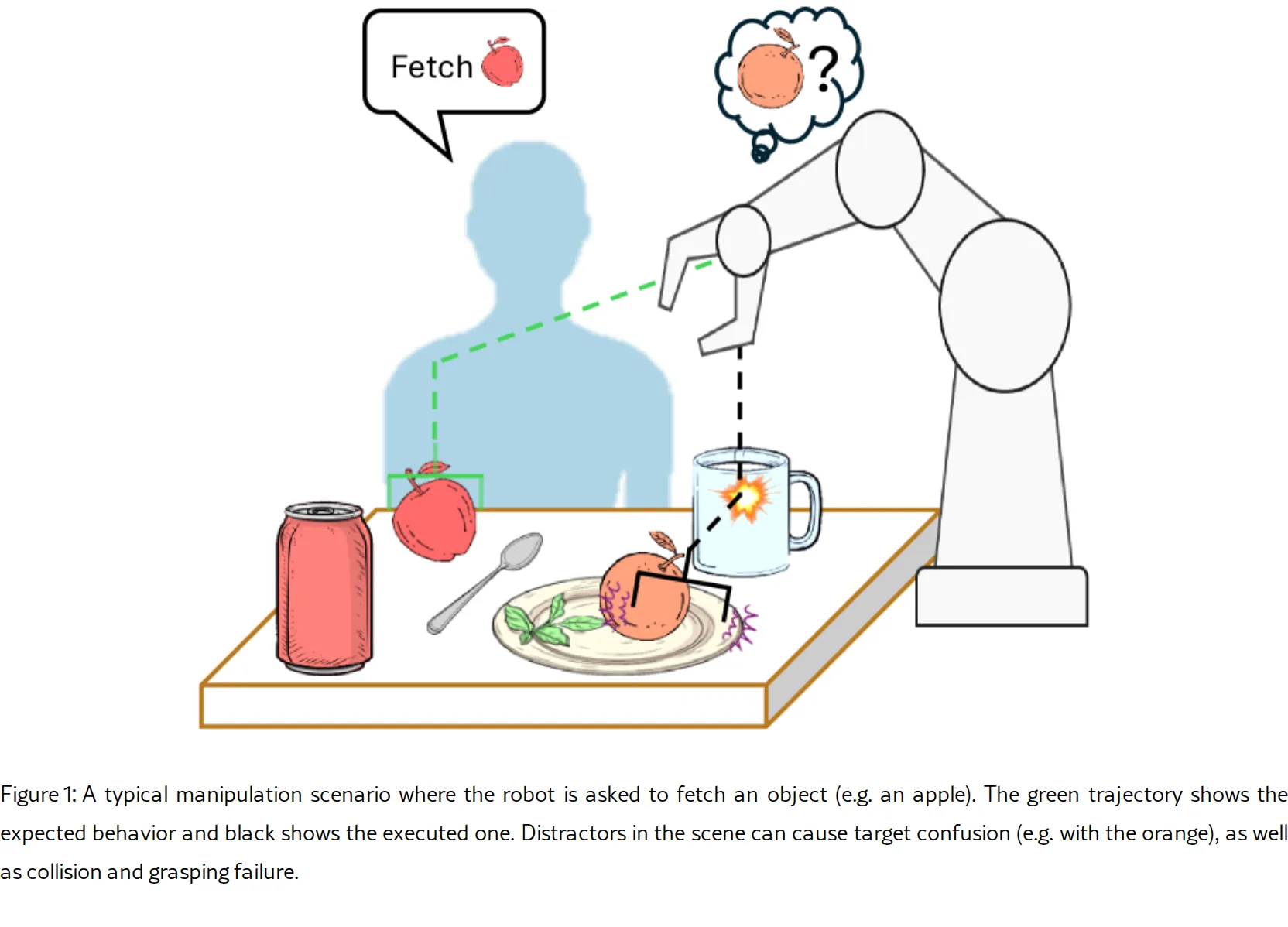
提出一种从心理物理学视角评估杂乱场景下机器人操作策略性能的评估协议,使用统一的杂乱度量标准(DvFC)来综合衡量环境因素、干扰物的数量、特性和…
- 提出一种从心理物理学视角评估杂乱场景下机器人操作策略性能的评估协议,使用统一的杂乱度量标准(DvFC)来综合衡量环境因素、干扰物的数量、特性和…
- 系统地在超逼真模拟器 SIMPLER 和现实世界中构建评估场景,对多个 视觉-语言-动作(VLA) 模型进行大规模实验,揭示视觉杂乱对策略性能…
- 论文旨在系统性地量化视觉杂乱的影响,识别不同策略的优缺点与脆弱性,并探索数据增强方法对缓解杂乱负面效果的作用。
Card 01
研究单位
研究单位
- 华为加拿大
Card 02
论文概述
论文概述
- 提出一种从心理物理学视角评估杂乱场景下机器人操作策略性能的评估协议,使用统一的杂乱度量标准(DvFC)来综合衡量环境因素、干扰物的数量、特性和排列。
- 系统地在超逼真模拟器 SIMPLER 和现实世界中构建评估场景,对多个 视觉-语言-动作(VLA) 模型进行大规模实验,揭示视觉杂乱对策略性能的显著负面影响。
- 论文旨在系统性地量化视觉杂乱的影响,识别不同策略的优缺点与脆弱性,并探索数据增强方法对缓解杂乱负面效果的作用。
Card 03
核心贡献
核心贡献
- 提出了一个新颖的、基于心理物理学的机器人操作策略评估协议,能够系统性地量化场景杂乱的影响。
- 设计并应用了一种统一的杂乱度量标准——双视角特征拥塞,该指标能有效预测策略在杂乱环境下的性能衰减。
- 对5个最先进的 VLA 模型进行了大规模实验(模拟和真实世界),表明场景杂乱可导致策略成功率下降高达 34%。
- 深入分析了不同策略的性能差异,发现尽管平均性能相似,但各策略具有独特的脆弱性和较低的成功场景重叠度,表明其性能具有互补性。
- 研究发现,通过微调增强数据来提升对杂乱场景的鲁棒性虽然有效,但不能同等补救杂乱带来的所有负面影响。
Card 04
方法描述
方法描述
- 采用 特征拥塞度量 作为核心度量,结合场景的颜色、对比度和方向协方差,并创新性地提出 双视角特征拥塞,融合机器人视角和俯视视角,同时衡量视觉杂乱和操作复杂性。
- 在 SIMPLER 模拟环境中系统性地生成评估场景,随机从 YCB 对象集中选取1-12个干扰物,在满足最小间距和目标可达性的约束下进行放置,并计算DvFC值进行分档采样。
- 实验涵盖了抓取、移动、堆叠、放置等核心机器人技能,并在模拟与现实世界中对比评估了多种 VLA 模型,分析了不同杂乱因素(如干扰物数量、视觉遮挡程度)对性能的具体影响。
Card 05
数据集与资源
数据集与资源
- 使用的数据集:YCB 对象集(用于生成干扰物)、Bridge 数据集、Fractal 数据集。
- 评估模型:Octo (在Bridge上训练)、OpenVLA (在Fractal上训练)、CogAct、π₀、SpatialVLA (后三者同时在Bridge和Fractal上训练)。
- 训练资源:论文未明确提及GPU/TPU具体使用情况。
Card 06
评估与结果
评估与结果
- 评估环境:SIMPLER 超逼真模拟器、真实世界 UR5e 机械臂操作平台。
- 主要评估指标:成功率(SR)、硬成功率(h-SR,无碰撞成功)、碰撞率(CR)、抓取失败率(GFR)、效率率(ER)。
- 关键实验结果:视觉杂乱导致所有 VLA 策略性能显著下降;不同策略对杂乱因素的敏感度不同(如 SpatialVLA 避碰能力较好,π₀ 抓取鲁棒性较强);DvFC度量值与策略成功率呈明显负相关;真实世界实验验证了模拟实验的发现;使用包含干扰物的数据微调策略可提升鲁棒性,但改善并不均衡。