一眼看懂
封面预览
论文提出了 MirrorLimb,一个基于 PICO XR 设备的低成本机器人远程操作系统框架,能够实时采集手部运动和姿态数据
- 论文提出了 MirrorLimb,一个基于 PICO XR 设备的低成本机器人远程操作系统框架,能够实时采集手部运动和姿态数据
- 该框架与 RealMirror 生态系统原生兼容,支持在 IsaacSim 模拟环境中进行稳定、精确的机器人轨迹录制,为 VLA(视觉-语言-…
- 系统支持多种末端执行器机器人(包括灵巧手和机械夹爪)的实时遥操作,旨在降低上位机器人操作研究的技术门槛
Card 01
研究单位
研究单位
- ZTE Terminators Group(中兴终端团队)
Card 02
论文概述
论文概述
- 论文提出了 MirrorLimb,一个基于 PICO XR 设备的低成本机器人远程操作系统框架,能够实时采集手部运动和姿态数据
- 该框架与 RealMirror 生态系统原生兼容,支持在 IsaacSim 模拟环境中进行稳定、精确的机器人轨迹录制,为 VLA(视觉-语言-动作)数据集构建提供便利
- 系统支持多种末端执行器机器人(包括灵巧手和机械夹爪)的实时遥操作,旨在降低上位机器人操作研究的技术门槛
Card 03
核心贡献
核心贡献
- 原生兼容 RealMirror 平台:结合 RealMirror 的机器人运动学/动力学优化能力,实现 IsaacSim 内的高精度稳定远程机器人遥操作
- WebXR/OpenXR 通信框架集成:提供标准化的手柄/手势原始数据映射接口,便于适配不同操作平台和各种机器人末端执行器
- 低成本硬件方案:支持 PICO 3/4 等 XR 设备,相比动作捕捉系统或 Apple Vision Pro 大幅降低成本
- 双通道数据采集:同时采集手柄命令和精细手势数据,采用 WebXR(手柄)和 OpenXR/Unity(手势)两种技术路径
Card 04
方法描述
方法描述
- 双通道采集架构:WebXR 手柄路径(浏览器运行时,72-90Hz)和 OpenXR 手势路径(Unity,60Hz,26 个手部关节)
- 数据传输:手柄数据通过 WebSocket(Socket.IO)传输,手势数据通过 UDP 二进制序列化传输以降低延迟
- 坐标系转换:WebXR 右手法系(Y-up)转换为 IsaacSim 右手法系(Z-up);手势路径从左手法系先归一化到右手,再转换到 Z-up
- 运动学优化:设计四层滤波规则(两层抖动过滤 + 两层跳变过滤)有效抑制末端执行器的抖动和突变,提高控制稳定性
Card 05
数据集与资源
数据集与资源
- 硬件设备:PICO 3/4 XR 设备
- 手部追踪:每只手 26 个追踪关节
- 采样率:手柄路径 72-90Hz,手势路径固定 60Hz
- 模拟环境:IsaacSim / IsaacLab
- 配套平台:RealMirror VLA 研究平台
Card 06
评估与结果
评估与结果
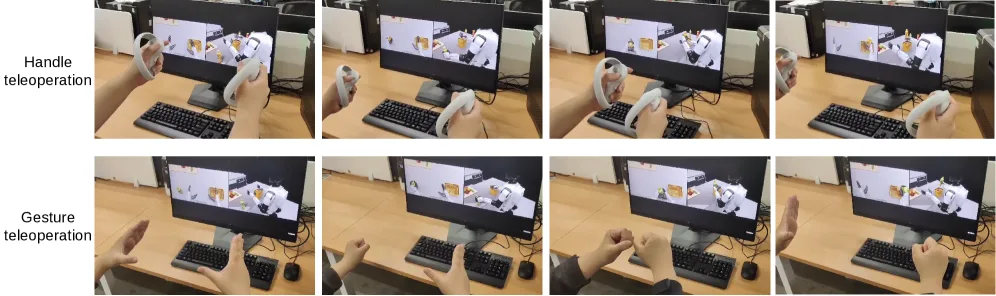
- 适用场景对比:手柄操作适合简单重复性任务的数据采集,手势操作更适合需要持续手部姿态调整的复杂任务
- 稳定性优化:通过运动学优化有效抑制生物震颤和 IK 求解器导致的末端抖动和跳变问题
- 数据接口标准化:定义完整的手势和手柄数据结构(timestamp、data、joints/buttons、pose 等字段),便于与 RealMirror 生态系统集成