返回列表
VLA / Vision-Language-Action 每日论文卡
待生成
论文详情
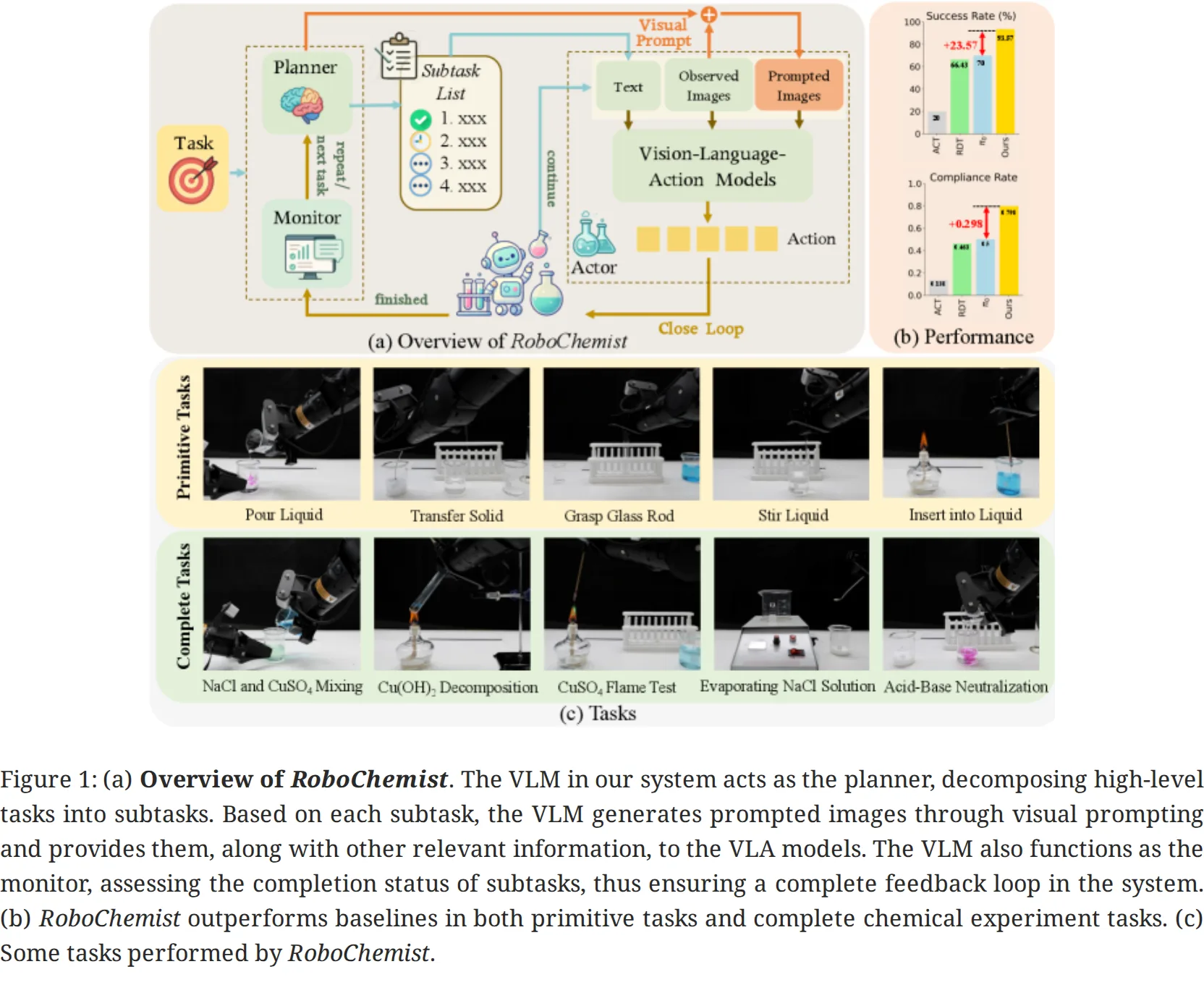
RoboChemist: Long-Horizon and Safety-Compliant Robotic Chemical Experimentation
2025-09-10 ·
原文
·
翻译
·
2509.08820
待生成
1 分钟读完
1 张阅读卡
一眼看懂
封面预览
待生成
待生成
Card 01
论文概述
论文概述
待生成
← 上一篇
SQAP-VLA: A Synergistic Quantization-Aware Pruning Framework for High-Performance Vision-Language-Action Models
下一篇 →
TA-VLA: Elucidating the Design Space of Torque-aware Vision-Language-Action Models