一眼看懂
封面预览
提出 RoboGate 框架,用于机器人在实际部署前的安全验证,通过物理模拟和自适应采样高效发现操作参数空间中的失效边界。
- 提出 RoboGate 框架,用于机器人在实际部署前的安全验证,通过物理模拟和自适应采样高效发现操作参数空间中的失效边界。
- 解决了工业机器人策略部署前验证的关键问题:传统均匀测试在参数空间探索效率低下,且缺乏跨机器人平台比较。
- 核心目标是为工业场景下的机器人策略部署提供一个系统性、可量化、可解释的风险管理“部署门禁”。
Card 01
研究单位
研究单位
- 作者 Byungjin Kim 所属机构在提供的HTML原文中未明确列出。
Card 02
论文概述
论文概述
- 提出 RoboGate 框架,用于机器人在实际部署前的安全验证,通过物理模拟和自适应采样高效发现操作参数空间中的失效边界。
- 解决了工业机器人策略部署前验证的关键问题:传统均匀测试在参数空间探索效率低下,且缺乏跨机器人平台比较。
- 核心目标是为工业场景下的机器人策略部署提供一个系统性、可量化、可解释的风险管理“部署门禁”。
Card 03
核心贡献
核心贡献
- 提出两阶段自适应采样策略:第一阶段用拉丁超立方采样进行均匀探索(20K实验),第二阶段在成功率30-70%的过渡区集中采样(10K实验),提升失效边界分辨率。
- 实现跨机器人平台验证:在 Franka Panda (7自由度) 和 UR5e (6自由度) 上并行评估,识别出四个对两个平台都有效的通用危险区域。
- 构建可解释的风险模型:使用逻辑回归产生闭式失效边界方程,提供带置信区间的关键参数阈值和单实验风险评分。
Card 04
方法描述
方法描述
- 核心创新是两阶段边界聚焦采样策略,旨在高效映射高维操作参数空间(8维)中的成功-失败过渡区。
- 使用 NVIDIA Isaac Sim 和 Newton物理引擎 构建高保真模拟后端,实现了对机器人操作场景的自动化生成、领域随机化和失效分类。
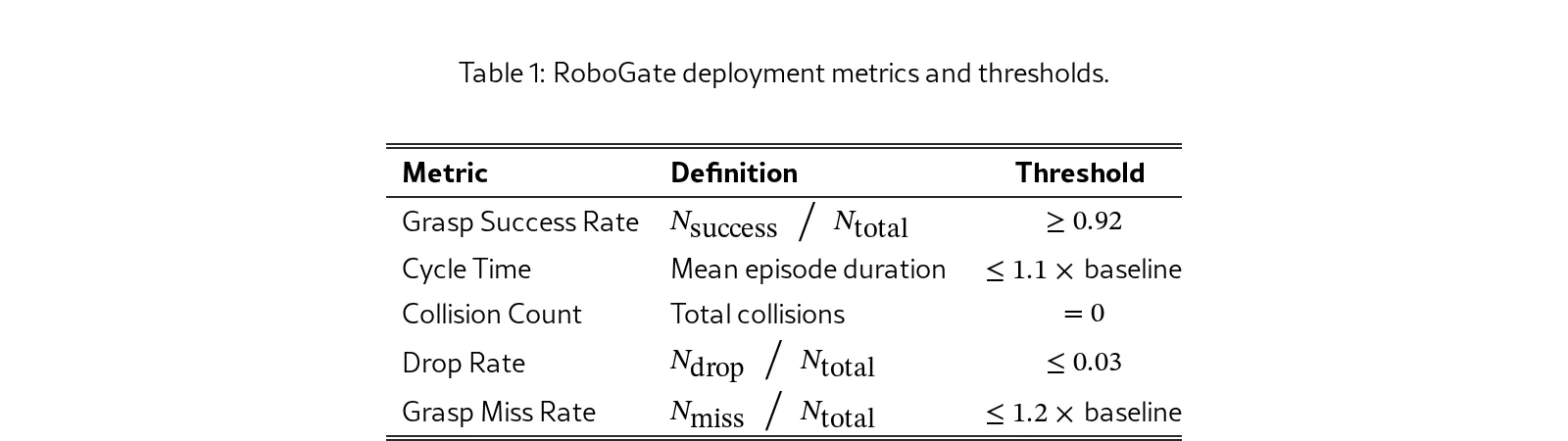
- 建立了一个包含五个硬性阈值的部署指标体系(如成功率≥92%,碰撞次数=0),并训练逻辑回归模型预测任意配置下的失效概率。
Card 05
数据集与资源
数据集与资源
- 未使用外部数据集,所有实验均在 NVIDIA Isaac Sim 模拟环境中生成,涉及30,000次物理模拟实验。
- 评估的模型包括:脚本化的抓取放置控制器,以及 Octo-Small 视觉-语言-动作模型(27M参数)。
- 训练和评估资源:单块 NVIDIA RTX 4090 GPU 工作站,总计约14 GPU小时完成所有实验。
Card 06
评估与结果
评估与结果
- 在 Franka Panda 和 UR5e 两种机器人平台上,对脚本化控制器进行了跨平台评估。
- 主要评估指标包括任务成功率、失效模式分布、风险模型的预测准确度(AUC)等。
- 关键结果:逻辑回归风险模型在合并数据集上AUC达到 0.780;发现了如“低摩擦与高质量组合”的通用危险区域;在VLA模型评估中,Octo-Small 在对抗性场景上成功率仅 30.9%,远低于脚本基线的94%。