一眼看懂
封面预览
本文为连续控制任务中行为克隆使用动作量化这一广泛实践提供了理论基础。
- 本文为连续控制任务中行为克隆使用动作量化这一广泛实践提供了理论基础。
- 研究分析了量化误差如何沿决策视界传播,并与统计样本复杂性相互作用。
- 论文旨在理解在稳定动力学和平滑策略条件下,对数量化动作的行为克隆何时以及为何有效或失效。
Card 01
研究单位
研究单位
- 论文作者来自 威斯康星大学麦迪逊分校。
Card 02
论文概述
论文概述
- 本文为连续控制任务中行为克隆使用动作量化这一广泛实践提供了理论基础。
- 研究分析了量化误差如何沿决策视界传播,并与统计样本复杂性相互作用。
- 论文旨在理解在稳定动力学和平滑策略条件下,对数量化动作的行为克隆何时以及为何有效或失效。
Card 03
核心贡献
核心贡献
- 在稳定动力学和策略满足概率平滑性(TVC/RTVC)条件下,建立了结合量化误差与样本量的遗憾上界,并证明其与下界匹配。
- 刻画了不同量化方案(如分箱量化与学习型量化)何时满足或违反平滑性要求,并指出违反该要求会导致巨大的遗憾。
- 提出了一种基于模型的增强方法,无需策略平滑性即可证明性地改善误差界限。
- 建立了联合捕捉量化误差与统计复杂性的信息论下界,并表明本文上界与此极限相匹配。
Card 04
方法描述
方法描述
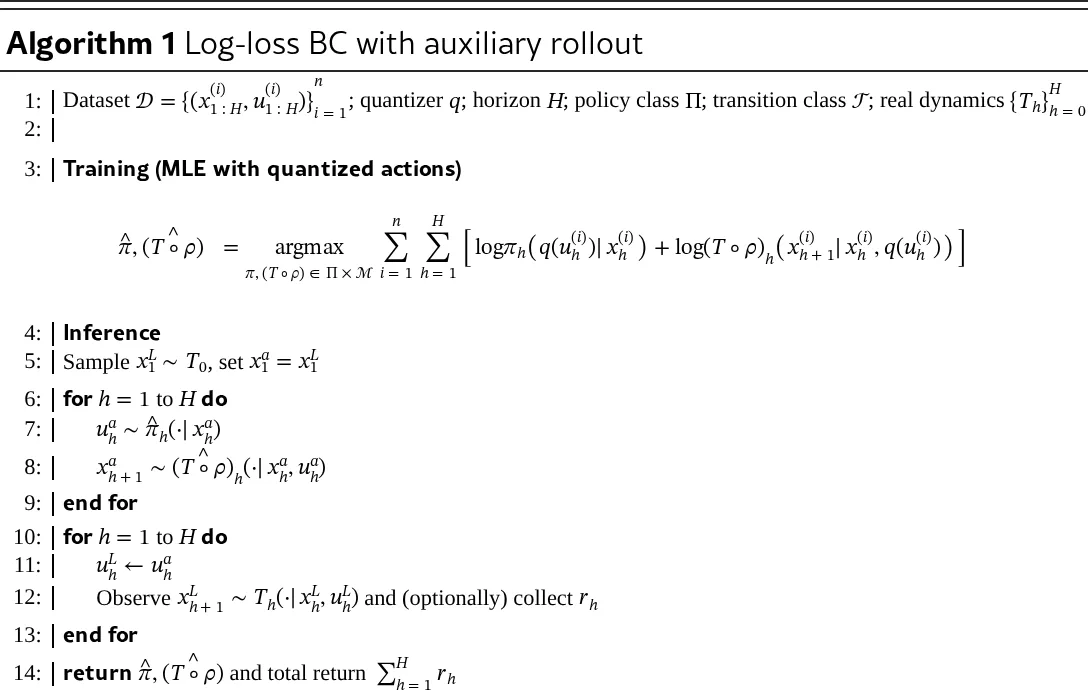
- 采用Log-loss行为克隆方法,将连续动作通过量化器映射为离散符号。
- 引入了概率增量输入-状态稳定性和松弛全变分连续性概念,分别用于刻画动力学稳定性和策略平滑性。
- 关键创新在于通过理论分析将量化误差与统计误差解耦并控制其在时间范围内的复合效应。
- 提出了基于模型的增强方法,通过利用动力学模型来绕过对量化策略平滑性的要求。
Card 05
数据集与资源
数据集与资源
- (根据提供的HTML原文,未明确列出具体数据集名称。)
- (原文未提及具体的模型规模、参数量及训练资源。)
Card 06
评估与结果
评估与结果
- (评估环境和基准因HTML原文截断未完整呈现。)
- 主要进行了理论分析,推导了遗憾(Regret)的上界和下界。
- 核心结果表明,在稳定动力学和平滑策略下,行为克隆可实现最优样本复杂性,且量化误差仅带来多项式级别的视界依赖。