一眼看懂
封面预览
研究目标:解决视觉-语言-动作(VLA)模型的持续学习问题,使机器人能够持续适应新任务,同时保留之前学习的技能
- 研究目标:解决视觉-语言-动作(VLA)模型的持续学习问题,使机器人能够持续适应新任务,同时保留之前学习的技能
- 核心问题:现有持续学习方法需要存储示例数据(exemplars)、难以处理长任务序列,或依赖任务标识符进行部署
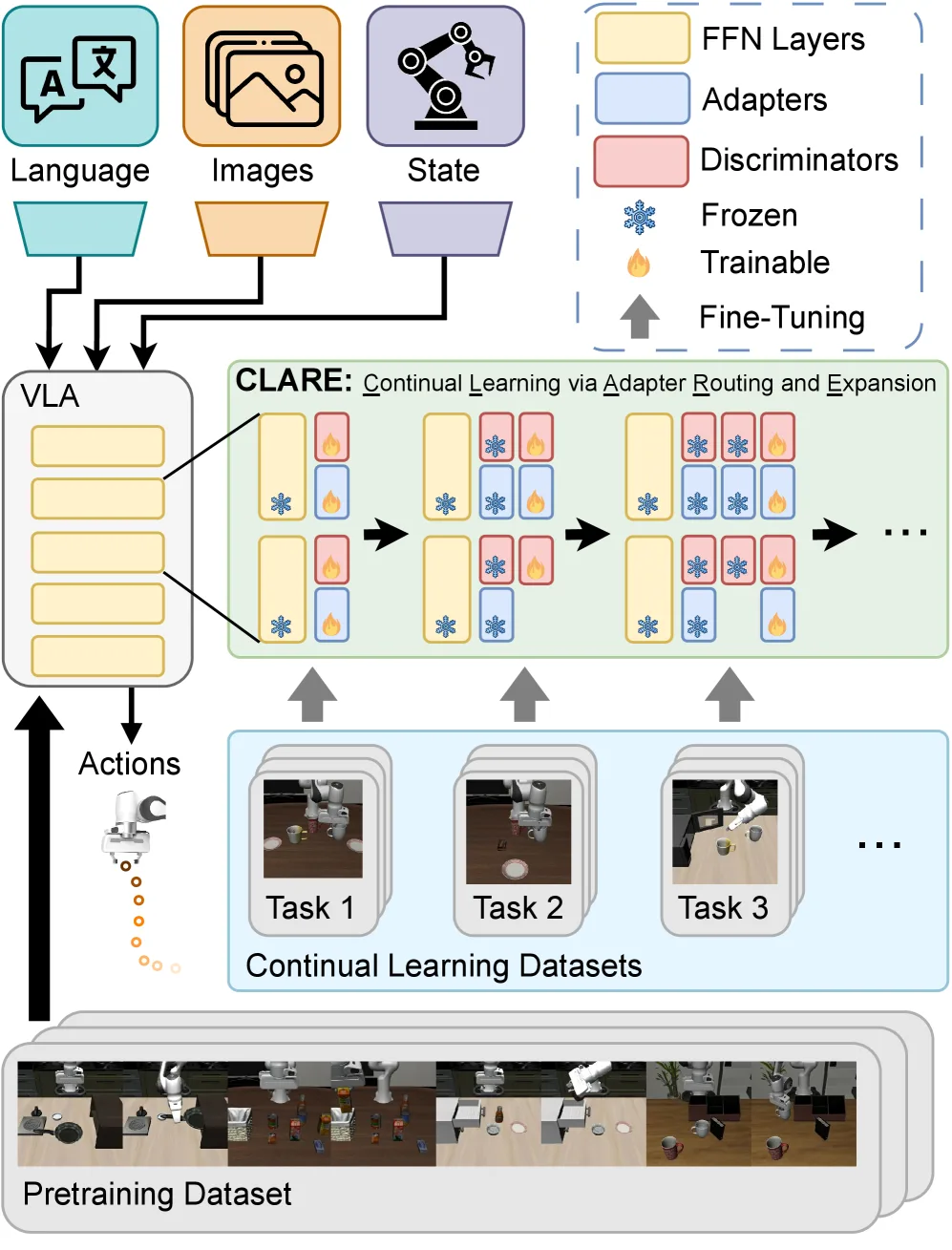
- 解决方案:提出 CLARE(Continual Learning via Adapter Routing and Expansion),一个无…
Card 01
研究单位
研究单位
- Technical University of Munich (TUM), Germany
- TUM School of Computation, Information and Technology
- Learning Systems and Robotics Lab
- Munich Institute of Robotics and Machine Intelligence (MIRMI)
- Robotics Institute Germany
Card 02
论文概述
论文概述
- 研究目标:解决视觉-语言-动作(VLA)模型的持续学习问题,使机器人能够持续适应新任务,同时保留之前学习的技能
- 核心问题:现有持续学习方法需要存储示例数据(exemplars)、难以处理长任务序列,或依赖任务标识符进行部署
- 解决方案:提出 CLARE(Continual Learning via Adapter Routing and Expansion),一个无需示例的通用参数高效持续学习框架
- 技术路线:通过在选定前馈网络层中注入轻量级模块化适配器,结合基于自编码器的路由机制,实现自主任务无关的推理
Card 03
核心贡献
核心贡献
- 提出轻量级模块化适配器框架,使 VLA 能够在不覆盖先验表示的情况下学习新技能
- 设计自主路由机制,在推理过程中基于特征相似性激活最适配器,无需任务标签
- 提出动态扩展策略,每个任务仅增加约 2% 的参数
- 在 LIBERO 基准上进行广泛模拟实验,显著优于现有持续学习基线方法
Card 04
方法描述
方法描述
- 基础策略:使用 Flow Matching 进行训练,将动作块从简单基础分布(如高斯)迁移到目标分布
- 模块化适配器:在前馈网络层中注入适配器作为并行侧支,采用编码器-解码器结构(ReLU激活)
- 自主路由:使用自编码器判别器计算重构误差,选择重构误差最小的判别器所链接的适配器
- 动态扩展:基于 z-score 阈值判断特征分布偏差,仅当新任务特征与所有先前任务显著不同时才扩展新适配器
Card 05
数据集与资源
数据集与资源
- 数据集:LIBERO 基准
- 预训练:LIBERO-90(90个短时域任务)
- 持续学习评估:LIBERO-10(10个顺序到达的长时域任务)
- 每个任务包含50条人类专家演示
- 模型:Diffusion Transformer (DiT) 基础策略,约 200M 参数
- 适配器规模:
- FFN 适配器:0.26M 参数
- 投影层适配器:3.2M 参数
- 判别器:0.33M(FFN)+ 1.4M(投影)参数
Card 06
评估与结果
评估与结果
- 评估指标:任务成功率、灾难性遗忘程度、参数效率
- 实验设置:使用Franka机械臂在厨房环境中执行任务
- 关键结果:
- CLARE 在新任务学习上表现优异
- 无需示例即可避免灾难性遗忘
- 显著优于基于示例的持续学习方法
- 动态扩展策略实现了知识重用和参数效率的平衡