一眼看懂
封面预览
提出了 Control Your Robot 框架,一个模块化、通用目的的统一系统,用于跨平台机器人数据采集和策略部署
- 提出了 Control Your Robot 框架,一个模块化、通用目的的统一系统,用于跨平台机器人数据采集和策略部署
- 旨在解决机器人控制领域的碎片化问题:硬件接口、数据格式和控制范式的异构性导致工具链分裂和部署效率低下
- 系统支持从多模态数据采集到推理的端到端集成,实现可扩展、可复现的机器人学习
Card 01
研究单位
研究单位
- 作者信息:Tian Nian ( affiliations 1)*, Weijie Ke ( affiliations2)*, Shaolong Zhu ( affiliations 3), Bingshan Hu ( affiliations 2)†
- 标注 * 表示同等贡献,† 表示通讯作者
Card 02
论文概述
论文概述
- 提出了 Control Your Robot 框架,一个模块化、通用目的的统一系统,用于跨平台机器人数据采集和策略部署
- 旨在解决机器人控制领域的碎片化问题:硬件接口、数据格式和控制范式的异构性导致工具链分裂和部署效率低下
- 系统支持从多模态数据采集到推理的端到端集成,实现可扩展、可复现的机器人学习
Card 03
核心贡献
核心贡献
- 提出 Control Your Robot,一个模块化、統一接口、闭环的数据采集-微调-部署系统,便于在异构机器人平台上收集演示数据
- 显著提高了数据采集系统的可重用性,支持灵活机器人注册、双模式控制(遥操作和轨迹回放)
- 提供了完全开源的框架,包含数据收集 API、训练和部署代码,可在 GitHub 访问
Card 04
方法描述
方法描述
- 三大设计原则:模块化(Modularity)、接口统一(Interface Unification)、流程标准化(Process Standardization)
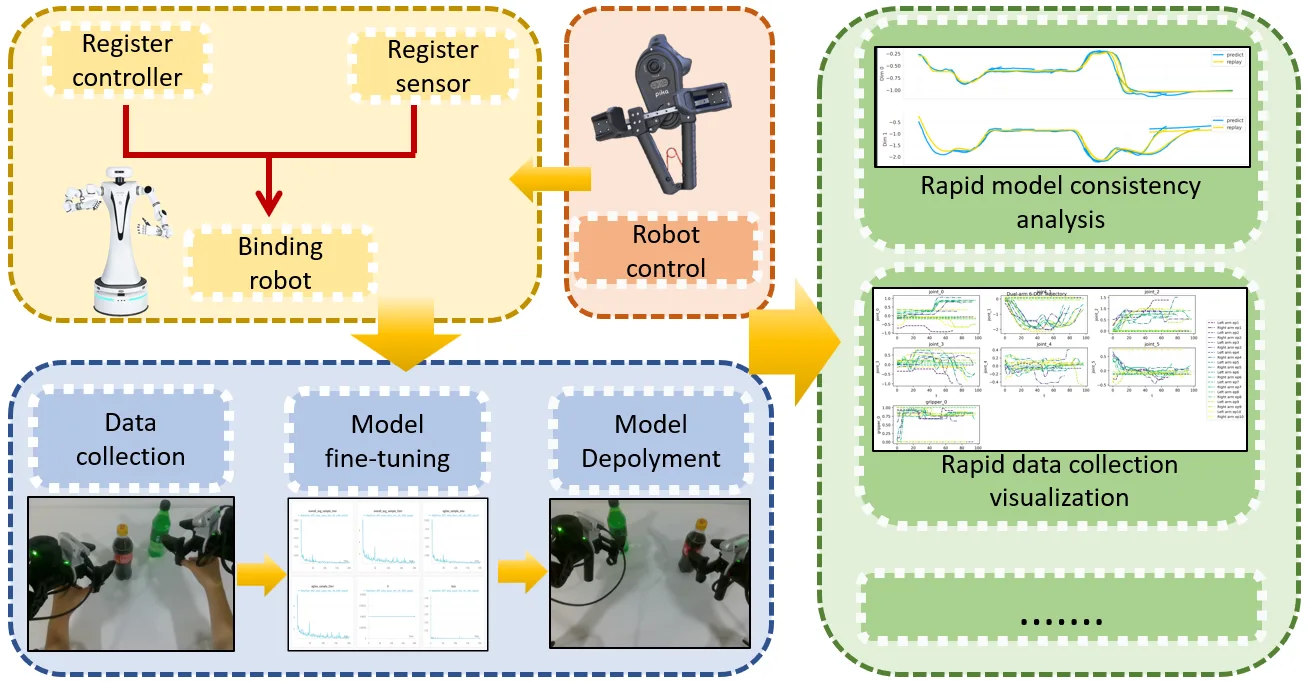
- 系统三组件:机器人注册(Robot Registration)、机器人控制(Robot Control)、数据到部署流水线(Data-to-Deployment Pipeline)
- 模块化设计:将机器人系统分解为控制器(controllers)、传感器(sensors)和数据处理模块(data processing modules),各模块提供可配置接口
- 双模式控制:支持基于检查点的轨迹执行和基于遥操作的交互控制
- 标准化流程:数据采集 → 预处理 → 模型微调 → 推理部署
Card 05
数据集与资源
数据集与资源
- 实验平台:单臂系统(DR-ALOHA 机械臂 + AGILEX-PIPER-ALOHA 主设备)、双臂系统(IMETA-Y1-ALOHA 双机械臂)
- 传感器配置:腕部摄像头、全局摄像头,30Hz 采样频率
- 测试任务:Place Can Pot(放置罐头)、Pick Dual Bottles(双臂抓取瓶子)、Put Cup Cabinet(抽屉取放杯子)、Stack Two Bowls(碗叠放)
- 训练算法:ACT(模仿学习算法)、π₀(视觉语言动作模型)
- 采样频率测试:机械臂 600Hz(实际 599.247Hz)、图像 60Hz(实际 59.997Hz)
Card 06
评估与结果
评估与结果
- 评估设置:每项任务进行 50 次测试试验
- 数据采集延迟:多频率控制设置中,主从臂同步频率稳定在 282.35Hz,数据采集频率为 59.99Hz
- 策略学习结果:使用 Control Your Robot 收集的数据训练的策略与专家演示高度一致
- 模型对比:ACT 模型因参数规模有限,在真实机器人数据上学习性能不足;π₀ 模型表现更好
- 关键发现:系统收集的数据有效支持细粒度策略学习,验证了框架在低延迟数据采集和策略部署方面的有效性