一眼看懂
封面预览
论文提出 CRISP(Compliant ROS2 Controllers for Learning-Based Manipulation P…
- 论文提出 CRISP(Compliant ROS2 Controllers for Learning-Based Manipulation P…
- 针对基于学习的控制器(如扩散策略、视觉-语言-动作模型)生成低频或不连续机器人状态变化的问题,提供平滑参考跟踪的低层控制器,将高层目标命令转换…
- 支持学习策略的无缝集成和远程操作,兼容任何暴露关节力矩接口的机械臂
Card 01
研究单位
研究单位
- Technical University of Munich (TUM), Germany
- TUM School of Computation, Information and Technology, Department of Computer Engineering, Learning Systems and Robotics Lab
- TUM Munich Institute of Robotics and Machine Intelligence (MIRMI)
Card 02
论文概述
论文概述
- 论文提出 CRISP(Compliant ROS2 Controllers for Learning-Based Manipulation Policies and Teleoperation),一个轻量级 C++ 实现的柔顺笛卡尔空间和关节空间控制器,专为 ROS2 控制标准设计
- 针对基于学习的控制器(如扩散策略、视觉-语言-动作模型)生成低频或不连续机器人状态变化的问题,提供平滑参考跟踪的低层控制器,将高层目标命令转换为关节力矩
- 支持学习策略的无缝集成和远程操作,兼容任何暴露关节力矩接口的机械臂
Card 03
核心贡献
核心贡献
- 机器人无关的柔顺笛卡尔和关节空间控制器,利用 ROS2 标准接口确保广泛兼容性
- 统一的数据收集和策略部署流程,通过 CRISP_PY Python 接口和 CRISP_GYM Gymnasium 接口实现
- 支持 1 kHz 实时控制,在实时 Linux 工作站上运行,与高层策略通过 ROS2 主题通信
- 提供关节限位屏障、摩擦力补偿、零空间控制等高级功能
- 内置 pinocchio 库进行刚体动力学计算,支持 URDF 标准格式
Card 04
方法描述
方法描述
- 任务力矩(Task Torque):实现两种控制器——笛卡尔阻抗控制器(CI) 和 操作空间控制器(OSC),分别基于虚拟弹簧模型和动力学惯性矩阵
- 零空间控制(Null Space Control):提供静态、动态和恒等三种零空间投影器,用于冗余机械臂的次级任务控制
- 关节屏障(Joint Barrier):防止关节到达极限位置,在接近极限时施加递增力矩
- 重力和科里奥利补偿:使用 pinocchio 的 RNEA 算法高效计算
- 摩擦力补偿:基于 sigmoid 函数的简化模型,避免零速度附近的不连续性
- 目标力矩控制:支持末端执行器六维力矩命令,用于接触丰富的任务
Card 05
数据集与资源
数据集与资源
- 硬件平台:Franka Robotics FR3(实际验证)
- 仿真平台:Kuka IIWA14、Kinova Gen3
- 控制频率:1 kHz 实时控制
- 软件依赖:ROS2、ros2_control、pinocchio 刚体动力学库
- 接口支持:Python 接口(CRISP_PY)、Gymnasium 环境(CRISP_GYM)
Card 06
评估与结果
评估与结果
- 评估环境:Franka FR3 硬件实验 + Kuka IIWA14/Kinova Gen3 仿真
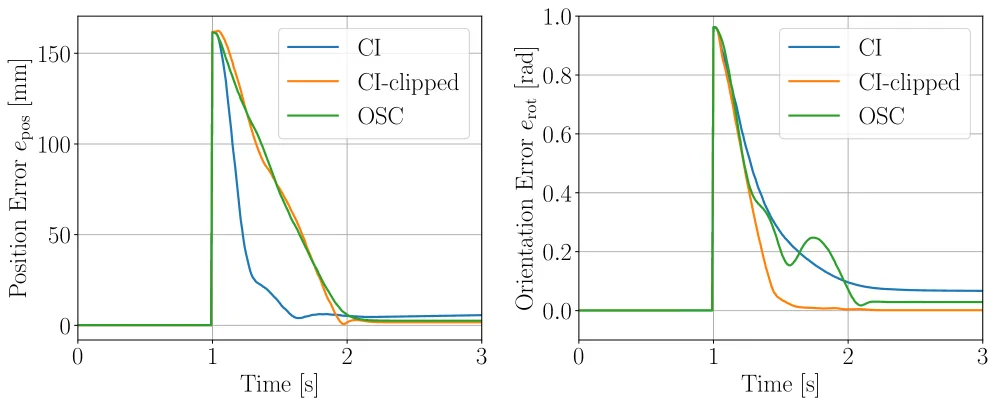
- 主要评估指标:位姿跟踪误差(位置误差和旋转误差稳态值)
- 关键实验结果:
- CI 控制器:位置稳态误差 4.73 mm,旋转稳态误差 0.0532 rad
- CI-clipped 控制器:位置稳态误差 0.81 mm,旋转稳态误差 0.0029 rad
- OSC 控制器:位置稳态误差 5.54 mm,旋转稳态误差 0.0998 rad
- 策略部署验证:成功部署 Diffusion Policy(约 30 Hz)和 SmolVLA(约 10 Hz)两种模仿学习策略
- 远程操作验证:实现带力反馈的乐高积木堆叠任务数据采集